

ЩҫШұЩҲЪҳЩҮ ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ Щ…ЩӮШ§Щ„ЩҮ “Щ…ШіЫҢШұЫҢШ§ШЁЫҢ ШұШЁШ§ШӘ ШЁШ§ Ъ©Щ…Ъ© ЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢ ЩҲ ШӘШіШӘ ШҜШұ ШЁШұШ§ШЁШұ Ш№ШҜЩ… ЩӮШ·Ш№ЫҢШӘ”
ЩҫШұЩҲЪҳЩҮ ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ Щ…ЩӮШ§Щ„ЩҮ “Щ…ШіЫҢШұЫҢШ§ШЁЫҢ ШұШЁШ§ШӘ ШЁШ§ Ъ©Щ…Ъ© ЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢ ЩҲ ШӘШіШӘ ШҜШұ ШЁШұШ§ШЁШұ Ш№ШҜЩ… ЩӮШ·Ш№ЫҢШӘ”
ШЁШ§ ШіЩ„Ш§Щ…
ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ Ш§ЫҢЩҶ Щ…ЩӮШ§Щ„ЩҮ ШЁШ§ ЩҶШұЩ… Ш§ЩҒШІШ§Шұ MATLAB Ш§ЩҶШ¬Ш§Щ… ШҙШҜЩҮ Ш§ШіШӘ. Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Ш§ЫҢЩҶ ЩҫШұЩҲЪҳЩҮ ШЁШұШ§ЫҢ ШҜШ§ЩҶШҙШ¬ЩҲЫҢШ§ЩҶ ШҜШұШі ЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢ (Reinforcement Learning)ШҢ Щ…ЩҲШ¶ЩҲШ№ ЩҫШ§ЫҢШ§ЩҶ ЩҶШ§Щ…ЩҮ Ъ©Ш§ШұШҙЩҶШ§ШіЫҢ ЩҲ ЩҫШұЩҲЪҳЩҮ ЩҮШ§ЫҢ ШҜШ§ЩҶШҙШ¬ЩҲЫҢЫҢ ШӘЩҲШөЫҢЩҮ Щ…ЫҢ ШҙЩҲШҜ. ШӘЩ…Ш§Щ… Ъ©ШҜЩҮШ§ЫҢ Щ„Ш§ШІЩ… ШЁШұШ§ЫҢ ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ Ш§ЫҢЩҶ Щ…ЩӮШ§Щ„ЩҮ ШҜШұ Ш§ШҜШ§Щ…ЩҮ ШўЩҲШұШҜЩҮ ШҙШҜЩҮ Ш§ШіШӘ.
Щ„ЫҢЩҶЪ© Щ…ЩӮШ§Щ„ЩҮ : www.yon.ir/PaperRL
ЪҶЪ©ЫҢШҜЩҮ Щ…ЩӮШ§Щ„ЩҮ : ШҜШұ Ш§ЫҢЩҶ ЩҫШұЩҲЪҳЩҮ Щ…ШіЫҢШұЫҢШ§ШЁЫҢ ЫҢЪ© ШұШЁШ§ШӘ (Ш№Ш§Щ…Щ„) ШЁШ§ Ъ©Щ…Ъ© ЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢ Ш§ЩҶШ¬Ш§Щ… ШҙШҜЩҮ Ш§ШіШӘ. ШҜШұ ЩҲШ§ЩӮШ№ ШұШЁШ§ШӘ ШЁШ§ЫҢШҜ ШЁШӘЩҲШ§ЩҶШҜ ШЁШ§ ШЁЩҮШұЩҮ ЪҜЫҢШұЫҢ Ш§ШІ ШіЫҢШ§ШіШӘ ШЁЩҮЫҢЩҶЩҮШҢ Ъ©ЩҲШӘШ§ЩҮ ШӘШұЫҢЩҶ ЩҲ Ш§ЫҢЩ…ЩҶ ШӘШұЫҢЩҶ Щ…ШіЫҢШұ ШұШ§ Ш§ЩҶШӘШ®Ш§ШЁ Ъ©ЩҶШҜ. ШұШЁШ§ШӘ ШҜШұ ЫҢЪ© Щ…ШӯЫҢШ· ШЁШ§ Ш§ШЁШ№Ш§ШҜ Ыҙ*ЫұЫІ ЩӮШұШ§Шұ ШҜШ§ШұШҜ ЩҲ ШЁШ№Ш¶ЫҢ Ш§ШІ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ Ш§ЫҢЩҶ Щ…ШӯЫҢШ·ШҢ ШўШӘШҙ ЪҜШұЩҒШӘЩҮ Ш§ЩҶШҜ ЩҲ ШұШЁШ§ШӘ ШЁШ§ЫҢШҜ ЫҢШ§ШҜ ШЁЪҜЫҢШұШҜ Ш§ШІ ШўЩҶ ЩҮШ§ ШҜЩҲШұЫҢ Ъ©ЩҶШҜ. ШЁШ№ШҜ Ш§ШІ ЩҫШ§ЫҢШ§ЩҶ ЫҢШ§ШҜЪҜЫҢШұЫҢШҢ Щ…ШӯЫҢШ· ШӘШәЫҢЫҢШұ Ъ©ШұШҜЩҮ ЩҲ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШҜЫҢЪҜШұЫҢ Ш§ШІ Ш§ЫҢЩҶ Щ…ШӯЫҢШ· ЩҶЫҢШІ ШўШӘШҙ ШІШҜЩҮ Щ…ЫҢ ШҙЩҲЩҶШҜ ЩҲ ШұШЁШ§ШӘ ШЁШ§ЫҢШҜ ШЁШӘЩҲШ§ЩҶШҜ Щ…ШіЫҢШұ Щ…ЩҶШ§ШіШЁ ЩҲ ШЁЩҮЫҢЩҶЩҮ ЫҢ ШҜЫҢЪҜШұЫҢ ШұШ§ Ш§ЩҶШӘШ®Ш§ШЁ Ъ©ЩҶШҜ ШӘШ§ ЩҫШ§ШҜШ§Шҙ ШЁЫҢШҙШӘШұЫҢ ШҜШұЫҢШ§ЩҒШӘ Ъ©ЩҶШҜ.
ЩҲЫҢЪҳЪҜЫҢ ЩҮШ§ЫҢ Ш§ЫҢЩҶ ЩҫШұЩҲЪҳЩҮ:
- ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ ШЁШ§ ЩҶШұЩ… Ш§ЩҒШІШ§Шұ Щ…ШӘЩ„ШЁ (MATLAB)
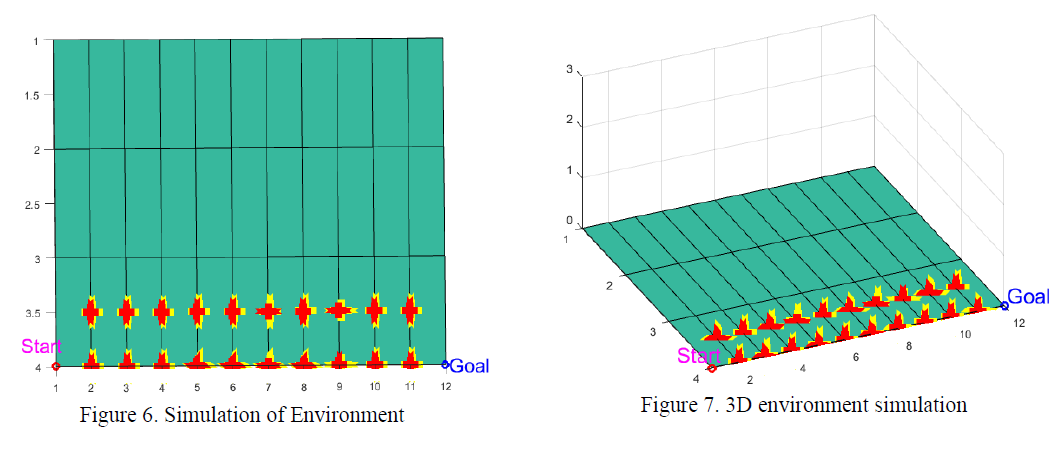
- ЩҶЩ…Ш§ЫҢШҙ ШіЩҮ ШЁШ№ШҜЫҢ (ЫіD) Щ…ШӯЫҢШ· ШӘШ№ШұЫҢЩҒ ШҙШҜЩҮ ЩҲ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШўШӘШҙ ЪҜШұЩҒШӘЩҮ ШҜШұ Щ…ШӯЫҢШ·
- ЩҶЩ…Ш§ЫҢШҙ Щ…ШіЫҢШұ ШӯШұЪ©ШӘ ШұШЁШ§ШӘ
- Ш§Щ…Ъ©Ш§ЩҶ Ш§Ш¶Ш§ЩҒЩҮ ЩҲ ШӯШ°ЩҒ Ъ©ШұШҜЩҶ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШўШӘШҙ ЪҜШұЩҒШӘЩҮ
- Ш§Щ…Ъ©Ш§ЩҶ ШӘШәЫҢЫҢШұ Ш§ШЁШ№Ш§ШҜ Щ…ШӯЫҢШ· ШЁЩҮ Ш§ШЁШ№Ш§ШҜ ШҜЩ„Ш®ЩҲШ§ЩҮ
- Ш§Щ…Ъ©Ш§ЩҶ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Ш¬ШҜЩҲЩ„ Q Ш§ШІ ЩҫЫҢШҙ ЫҢШ§ШҜЪҜЫҢШұЫҢ ШҙШҜЩҮ
- ШҜШ§ШұШ§ЫҢ ШіЩҮ Щ…ШҜЩ„ Ш§ШІ ЩҫЫҢШҙ ЫҢШ§ШҜЪҜЫҢШұЫҢ ШҙШҜЩҮ (Ш¬ШҜЩҲЩ„ Ш§ШұШІШҙ Q) – ШЁШұШ§ЫҢ ШұШіЫҢШҜЩҶ ШЁЩҮ Щ…ШіЫҢШұ Ш§ЫҢЩ…ЩҶ ЩҲ Ъ©ЩҲШӘШ§ЩҮ ШӘШұЫҢЩҶ Щ…ШіЫҢШұ
Щ…ШӯЫҢШ· ШӘШ№ШұЫҢЩҒ ШҙШҜЩҮ ШЁЩҮ ШҙЪ©Щ„ ШІЫҢШұ Ш§ШіШӘ:

ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ ШіЩҮ ШЁШ№ШҜЫҢ (ЫіD) Щ…ШӯЫҢШ· ЩҲ ЩӮШұШ§ШұЪҜЫҢШұЫҢ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШўШӘШҙ ЪҜШұЩҒШӘЩҮ ШҜШұ Щ…ШӯЫҢШ· Щ…ШӘЩ„ШЁ (MATLAB) :
ЩҶШӘШ§ЫҢШ¬ ЩҲ Ш®ШұЩҲШ¬ЫҢ ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ вҖ“ Щ…ШіЫҢШұ Ш§ЫҢЩ…ЩҶ ЩҲ Ъ©ЩҲШӘШ§ЩҮ ШӘШұЫҢЩҶ Щ…ШіЫҢШұ ЩҫЫҢШҙЩҶЩҮШ§ШҜЫҢ ШұШЁШ§ШӘ:

ЩҶШӘШ§ЫҢШ¬ ЩҲ Ш®ШұЩҲШ¬ЫҢ ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ вҖ“ ШӘШәЫҢЫҢШұ Щ…ШӯЫҢШ·ШҢ ШўШӘШҙ ШІШҜЩҶ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ Ш¬ШҜЫҢШҜ :

ЩҶШӘШ§ЫҢШ¬ ЩҲ Ш®ШұЩҲШ¬ЫҢ ШҙШЁЫҢЩҮ ШіШ§ШІЫҢ вҖ“ ШӘШәЫҢЫҢШұ Щ…ШӯЫҢШ· ЩҲ Щ…ШіЫҢШұ ЩҫЫҢШҙЩҶЩҮШ§ШҜЫҢ Ш¬ШҜЫҢШҜ ШұШЁШ§ШӘ:

Ш§Щ…ЫҢШҜЩҲШ§ШұЩ… Ш§ШІ ШҜШ§ЩҶЩ„ЩҲШҜ Ш§ЫҢЩҶ ЩҫШұЩҲЪҳЩҮ Щ„Ш°ШӘ ШЁШЁШұЫҢШҜ.
ШЁШұЪҶШіШЁ ЩҮШ§: MatlabReinforcement learningRLШ§ШұШҙШҜЩҫШ§ЫҢШ§ЩҶ ЩҶШ§Щ…ЩҮЩҫШұЩҲЪҳЩҮЩҫШұЩҲЪҳЩҮ Ъ©Ш§ШұШҙЩҶШ§ШіЫҢ Ш§ШұШҙШҜЩҫШұЩҲЪҳЩҮ Щ…ШӘЩ„ШЁЩҫШұЩҲЪҳЩҮ ЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢШҙШЁЫҢЩҮ ШіШ§ШІЫҢШҙШЁЫҢЩҮ ШіШ§ШІЫҢ Щ…ЩӮШ§Щ„ЩҮЪ©Ш§ШұШҙЩҶШ§ШіЫҢ Ш§ШұШҙШҜЩ…ШӘЩ„ШЁЩ…ЩӮШ§Щ„ЩҮЩ…ЩӮШ§Щ„ЩҮ RLЩ…ЩӮШ§Щ„ЩҮ ЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢЩҮЩҲШҙ Щ…ШөЩҶЩҲШ№ЫҢЫҢШ§ШҜЪҜЫҢШұЫҢ ШӘЩӮЩҲЫҢШӘЫҢ
ШҜШіШӘЩҮ: ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ ШҢ ШӘШӯШөЫҢЩ„Ш§ШӘ ШӘЪ©Щ…ЫҢЩ„ЫҢ ШҢ ШіЩҲШұШі Ъ©ШҜ ШҢ Щ…ШӘЩ„ШЁ





